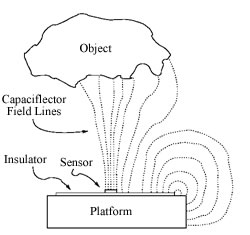
The capaciflector is a sensor invented and patented by John Vranish about fifteen years ago at NASA Goddard Space Flight Center. It is able to sense an object up to 46 cm, which can be applied to collision avoidance, navigation, and mapping an image of the object or terrain. These capaciflectors use electric fields to measure the capacitance between the sensor and the object. Since every material has a unique permittivity, an object can be identified by scanning its permittivity curves vs. frequency information and matching its identity to that stored in a database. This frequency scanning capaciflector provides scientists and engineers with a lightweight and robust device that will have the ability to quickly identify objects and track water/ice boundaries with a rover in cold, dark areas. Two electrical engineering students from Michigan State University are working with Dr. Charles Campbell, Jr. to take the basic schematics of an old capaciflector and build a new one with scanning capabilities. For more information on capaciflectors, visit the Capaciflector Technology page. |
 |